![]()
- Introduction
- Consortium
- Description
- 3D Mapping
![]()
The focus of the project "System of the mobile robot TELERESCUER for inspecting coal mine ar-eas affected by catastrophic events" – supported by European Commission - Research Fund for Coal and Steel - is to develop a system for the virtual teleportation (or virtual immersion) of rescuers to the subterranean areas of a coal mine that have been closed due to a catastrophic event within them.
Nowadays, human rescuers inspect such areas. The activity of rescuers is extremely dangerous. Moreover, human rescuers are only allowed to enter a restricted area if the values of several critical parameters achieve acceptable levels, which often require long waiting times. To overcome these problems and improve the efficiency of operation of human rescuers, a TeleRescuer system will be developed. It will take advantage of a special unmanned vehicle (UV) capable of moving within the area affected by the catastrophic event (i.e., with many obstacles, such as parts of damaged machin-ery and equipment, fallen rocks, damaged installations, etc.).
The UV will be equipped with sensors and video cameras (standard and IR). A breakthrough in the operation of such UVs will depend on the real possibility of the virtual immersion – or virtual teleportation – of the rescuer to the area of operation, which will be achieved by combining three key technologies. First, particular attention will be paid to the interface of the rescuer/UV, the goal of which is to make possible direct action in the in-spected area while the operator remains in a safe place. To this end, both virtual and augmented reali-ty will be widely applied.
Second, to allow this virtual teleportation, a very powerful communication system will be developed to allow for the broadband broadcasting of videos, results of measurements, and the virtual, direct control of the UV and its sensors and effectors. Third, a very realistic simulator will be developed to allow for the testing of the interface and to train rescuers in controlling and using the UV during the rescue operations in a representative environment. Finally, the general approach and the system itself will undergo extensive tests in an environment that is very similar to the operat-ing conditions of rescuers in a real coal mine, supervised by the Mines Rescue Station.
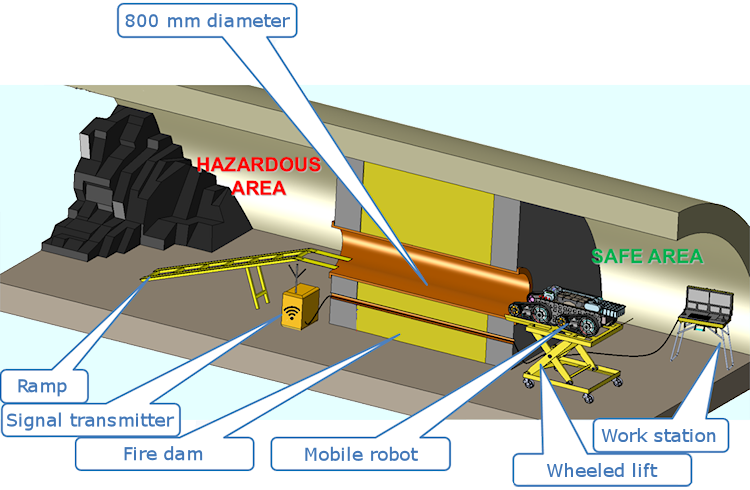
Schema of the fire dam after a catastrophic event in a coal mine

TeleRescuer mobile robot - 3D visualization

TeleRescuer mobile robot - photo of the prototype on a mining trade fair
The project has been carried out in a framework of an EU programme of the Research fund for Coal and Steel under the grant agreement No. RFCR-CT-2014-00002 and by Polish Ministry for Science and Higher Education from financial sources that constitute the public aid in years 2014-2017 as-signed for an accomplishment of an international co-financed project.
Official TeleRescuer web presentation (www.telerescuer.polsl.pl)